
M190 |
|
|
|
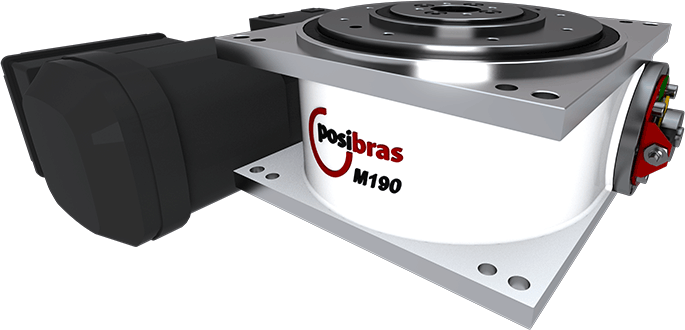
The M190 rotary indexing table is designed for lightweight applications that do not require carrying heavy loads. It’s compact, making it easy to install with just four screws. It can be mounted horizontally, vertically, or inverted. It’s perfect for applications such as:
|
 |
|
| Turntable Diameter: | 190 mm7.48 in |
| Center Opening Diameter: | 35 mm1.378 in (hole through) |
| Rotation Direction: | Clockwise, counter-clockwise and also in reversing mode |
| Number of Indexes: | Indexed cam: 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 18, 20, 21, 22, 24, 26, 27, 28, 30, 32, 33, 36 (more options available upon request), or Continuous cam |
| Motor Voltage: | 220 V / 380 V / 440 V |
| Motor Frequency: | 50 Hz / 60 Hz |
| Motor Power: | 0.11 to 0.55 KW |
| Weight without Gearmotor: | approximately 18 Kgapproximately 39 lbs |
| Weight with Gearmotor: | 23approximately 23 Kgapproximately 51 lbs (varies based on the gearmotor installed) |
| Indexing Accuracy: | ±0.018 mm at 50 mm center radius±0.00071 in at 2 in center radius |
| Repeatability Accuracy: | ±0.009 mm at 50 mm center radius±0.00035 in at 2 in center radius |
| Inductive Sensor: | PNP NA (from 10V to 36 V) |
| Load | Description | Values |
|---|---|---|
 |
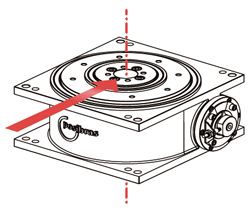
A- Maximum Axial Load (*): Represents the total weight evenly distributed on the turntable. The maximum load refers to the forces on the turntable. This doesn’t imply that the indexing table will rotate this mass. The ability to rotate depends on three factors:
|
1000 Kg2204 lbs |
 |
B- Maximum Radial Load: Represents forces perpendicular to the turntable’s center, usually exerted by external actuators aligned to the center of the turntable. | 1000 Kg2204 lbs |
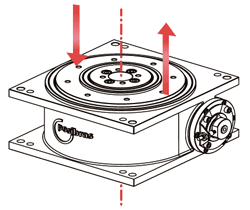 |
C- Maximum Vertical Torque: Represents the imbalance of weights on the turntable or its twisting. This is usually caused by external actuators that exert axial force on only one side of the turntable. | 1000 Nm737 ft.lbs |
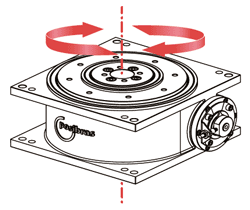 |
D- Maximum Horizontal Torque: Represents external forces in the rotation direction of the indexing table, either forcing the turntable to rotate or brake. | 238 to 500 Nm175 to 368 ft.lbs |
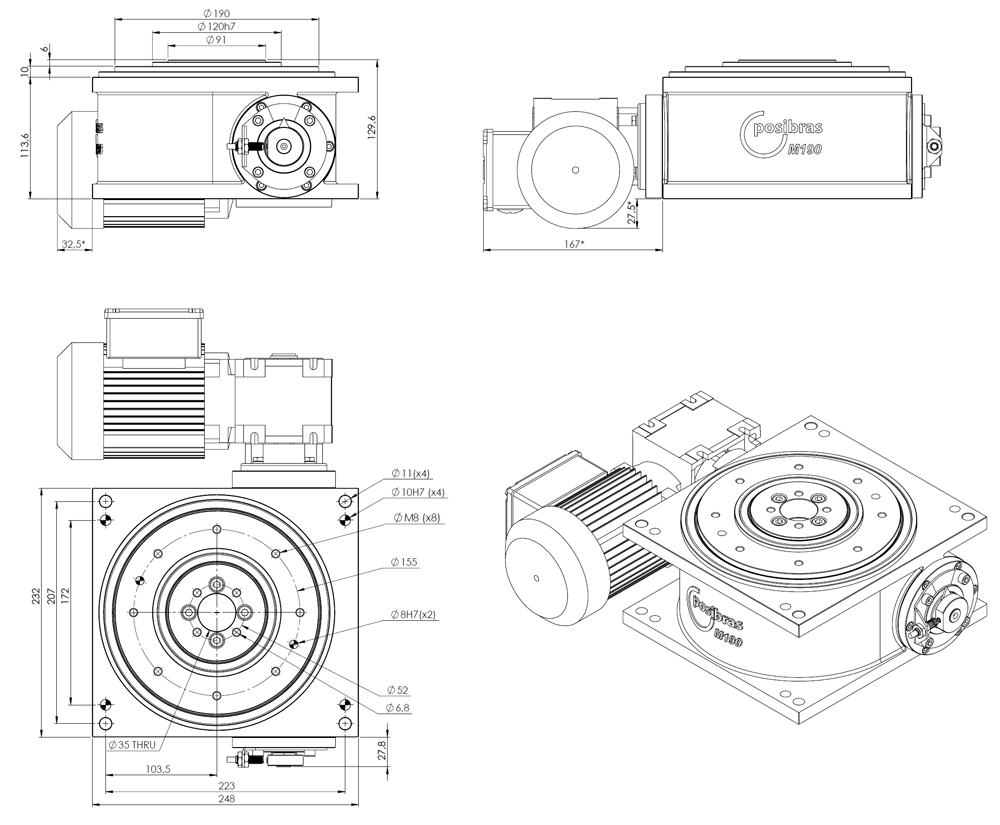
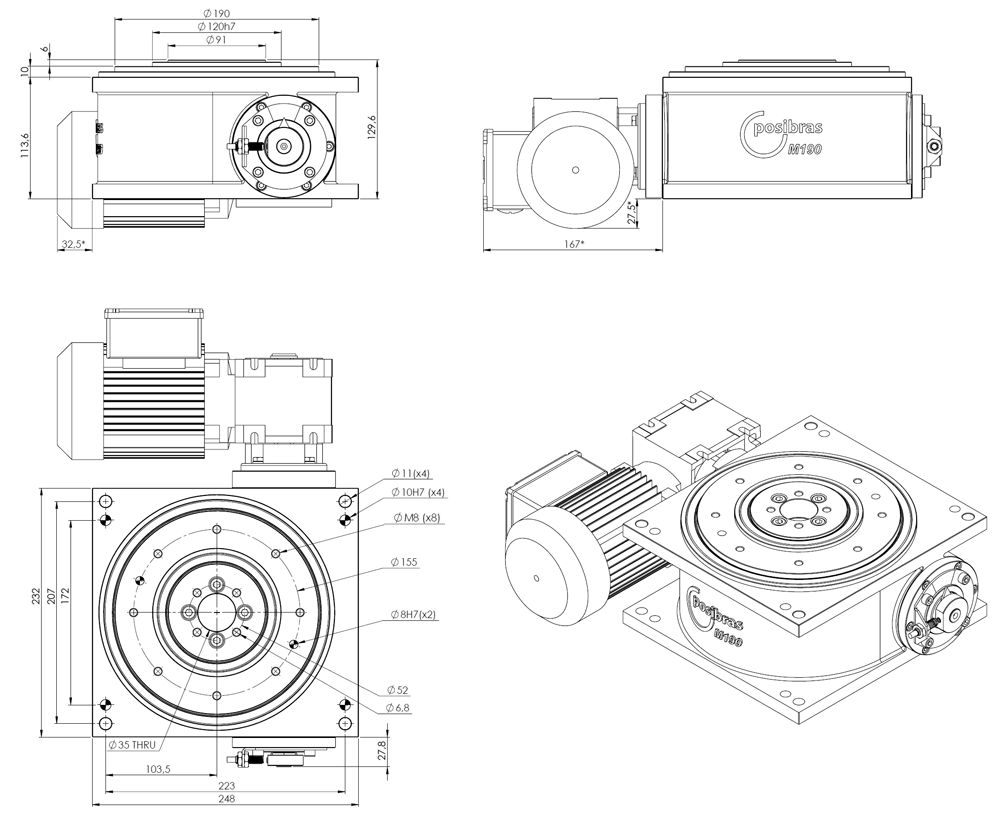
M190 main dimensions
(*) – measurements can vary depending on the geramotor attached to the indexing table |
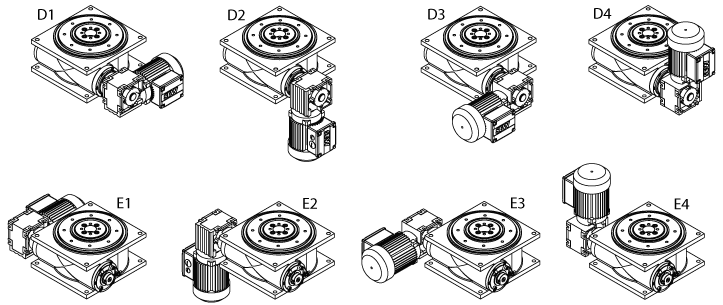
M190 geramotor assembly position
|
Download the instruction manual – click on the icon below |

Download CAD 3D part
|
| rotary index table, indexer, machine building, rotary machines, indexing ring, automation equipment, linear machine, rotary stage, rotary index, rotary indexing, rotary indexer, indexers, rotary transfer, indexing rotary tables, assembly machinery, assembly machines, assembly automation equipment, indexing conveyor, assembly conveyor |