
M235 |
|
|
|
The Rotary Indexing Table model M235 is suitable for medium-load applications. Compact and lightweight, it can be easily installed using 4 screws on its body. It can be mounted horizontally, vertically, or inverted (upside down). Ideal for applications such as:
|
 |
|
| Rotating plate diameter: | 235 mm9.25 in |
| Cable pass-through hole diameter: | 45 mm (through)1.77 in (through) |
| Rotation direction: | Clockwise, counterclockwise, or alternating both |
| Number of steps per rotation: | Indexed cam of: 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 18, 20, 21, 22, 24, 26, 27, 28, 30, 32, 33, 36 (others upon consultation), or Continuous cam |
| Motor voltage: | 220 V / 380 V / 440 V |
| Motor frequency: | 50 Hz / 60 Hz |
| Motor power: | 0.25 to 2.2 KW |
| Weight without geared motor: | approx. 40 Kg approx. 88 lbs |
| Weight with geared motor: | approx. 60 Kg (varies according to the geared motor applied)approx. 132 lbs (varies according to the geared motor applied) |
| Stopping precision: | ±0.014 mm at 50 mm center radius±0.00055 in at 2 in center radius |
| Stopping repeatability: | ±0.007 mm at 50 mm center radius±0.00028 in at 2 in center radius |
| Inductive sensor: | PNP NA (10 V to 36 V) |
| Load | Description | Values |
|---|---|---|
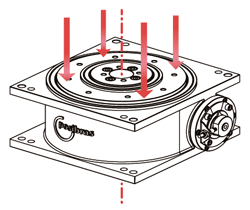 |
A- Maximum axial load (*): Represents the total evenly distributed mass on the rotating plate (or total weight)(*) – the maximum total load refers to the forces on the rotating plate. This doesn’t mean that the indexing table will be able to rotate such a mass, as the rotation depends on three factors:
|
5000 Kg11000 lbs |
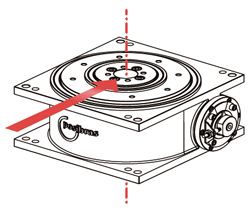 |
B- Maximum radial load: Represents forces perpendicular to the center of the rotating plate, generally exerted by actuators outside of the indexing tables, aligned to the center of this plate. |
700 Kg1540 lbs |
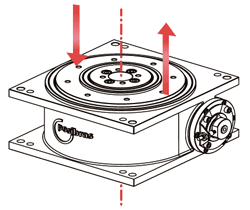 |
C- Maximum vertical torque: Represents the unbalance of masses on the rotating plate, or the twisting of this rotating plate usually caused by actuators outside of the indexing table that exert axial force on only one side of the rotating plate. |
3000 Nm2212 ft.lbs |
 |
D- Maximum horizontal torque: Represents external forces in the rotation direction of the indexing table, forcing the rotating plate to turn or brake. |
1600 to 2400 Nm1180 to 1770 ft.lbs |
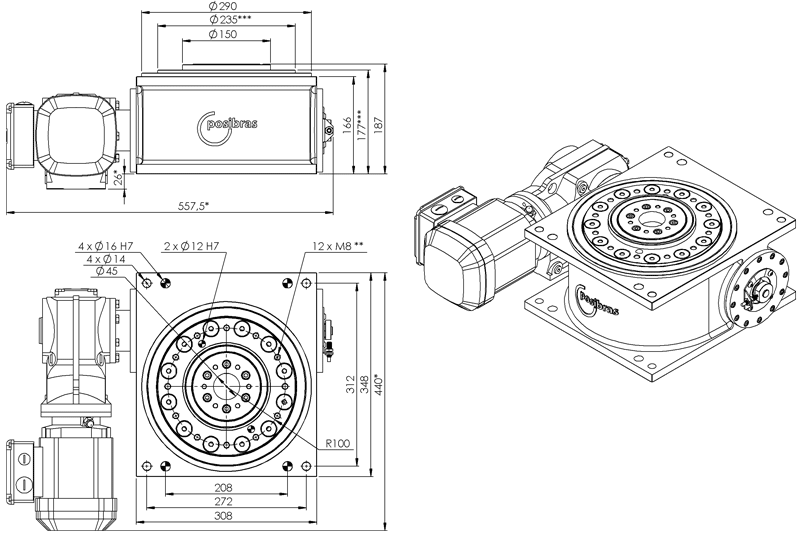
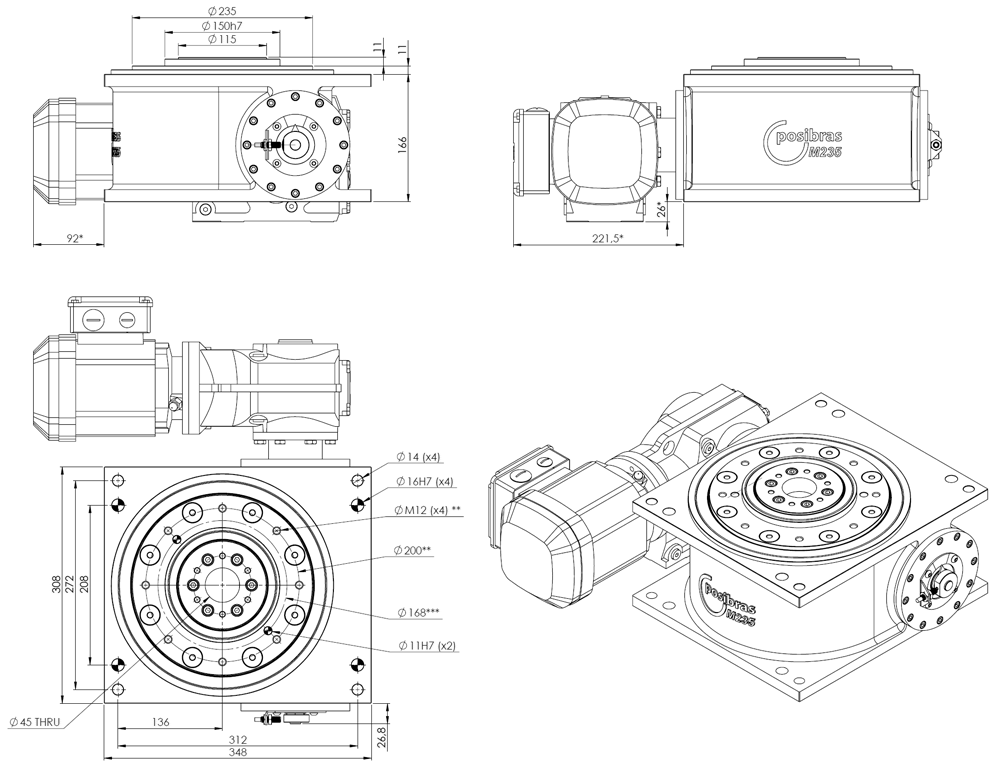
M235 main dimensions
(*) – measurements can vary depending on the geramotor attached to the indexing table |
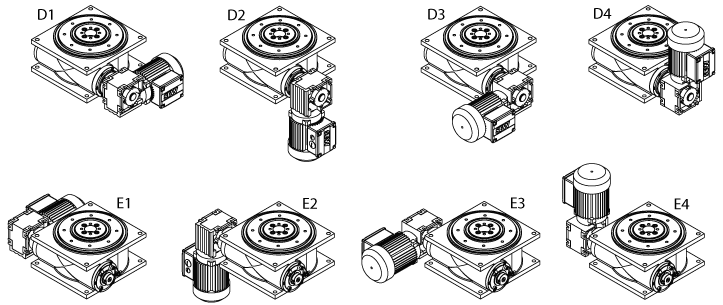
M235 geramotor assembly position
|
Download the instruction manual – click on the icon below |

Download CAD 3D part
|
| rotary index table, indexer, machine building, rotary machines, indexing ring, automation equipment, linear machine, rotary stage, rotary index, rotary indexing, rotary indexer, indexers, rotary transfer, indexing rotary tables, assembly machinery, assembly machines, assembly automation equipment, indexing conveyor, assembly conveyor |